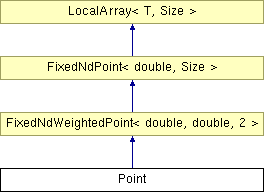
Inheritance diagram for Point:
Provides a weight value. These may be changed to use the STL pair<> template in the future, but since I already wrote this code, but I had written all of the code for this before Bill suggested it.
Definition at line 162 of file RobotTypes.H.
Public Member Functions | |
| Point () | |
| Point (const double &x, const double &y) | |
| Point (const double &x, const double &y, const double &value) | |
| void | x (const double &x) |
| void | y (const double &y) |
| const double | x () const |
| const double | y () const |
| Point | ( | ) | [inline] |
Definition at line 164 of file RobotTypes.H.
References FixedNdWeightedPoint< double, double, 2 >::value().
| Point | ( | const double & | x, | |
| const double & | y | |||
| ) | [inline] |
Definition at line 165 of file RobotTypes.H.
References FixedNdWeightedPoint< double, double, 2 >::value().
| Point | ( | const double & | x, | |
| const double & | y, | |||
| const double & | value | |||
| ) | [inline] |
Definition at line 166 of file RobotTypes.H.
References FixedNdWeightedPoint< double, double, 2 >::value().
| void x | ( | const double & | x | ) | [inline] |
Definition at line 168 of file RobotTypes.H.
Referenced by main(), VectorMover::moveToPoint(), ObstacleAvoider::moveToPoint(), VectorMover::moveToRelativePoint(), ObstacleAvoider::moveToRelativePoint(), and updateWaypoint().
| void y | ( | const double & | y | ) | [inline] |
Definition at line 169 of file RobotTypes.H.
Referenced by main(), VectorMover::moveToPoint(), ObstacleAvoider::moveToPoint(), VectorMover::moveToRelativePoint(), ObstacleAvoider::moveToRelativePoint(), and updateWaypoint().
| const double x | ( | ) | const [inline] |
Definition at line 170 of file RobotTypes.H.
| const double y | ( | ) | const [inline] |
Definition at line 171 of file RobotTypes.H.
 1.5.1
1.5.1