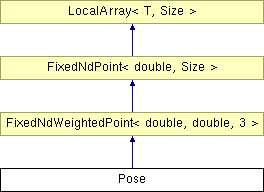
Inheritance diagram for Pose:
Provides a weight value.
Definition at line 196 of file RobotTypes.H.
Public Member Functions | |
| Pose () | |
| Pose (const double &x, const double &y) | |
| Pose (const double &x, const double &y, const double &theta) | |
| Pose (const double &x, const double &y, const double &theta, const double &value) | |
| void | x (const double &x) |
| void | y (const double &y) |
| void | theta (const double &theta) |
| const double | x () const |
| const double | y () const |
| const double | theta () const |
| Pose | ( | ) | [inline] |
Definition at line 198 of file RobotTypes.H.
References FixedNdWeightedPoint< double, double, 3 >::value().
| Pose | ( | const double & | x, | |
| const double & | y | |||
| ) | [inline] |
Definition at line 199 of file RobotTypes.H.
References FixedNdWeightedPoint< double, double, 3 >::value().
| Pose | ( | const double & | x, | |
| const double & | y, | |||
| const double & | theta | |||
| ) | [inline] |
Definition at line 200 of file RobotTypes.H.
References FixedNdWeightedPoint< double, double, 3 >::value().
| Pose | ( | const double & | x, | |
| const double & | y, | |||
| const double & | theta, | |||
| const double & | value | |||
| ) | [inline] |
Definition at line 201 of file RobotTypes.H.
References FixedNdWeightedPoint< double, double, 3 >::value().
| void x | ( | const double & | x | ) | [inline] |
Definition at line 203 of file RobotTypes.H.
Referenced by StereoDataCollector::fileWriterThread(), main(), moveRelative(), rotateAbsolute(), rotateRelative(), translate(), and updateWaypoint().
| void y | ( | const double & | y | ) | [inline] |
Definition at line 204 of file RobotTypes.H.
Referenced by StereoDataCollector::fileWriterThread(), main(), moveRelative(), rotateAbsolute(), rotateRelative(), translate(), and updateWaypoint().
| void theta | ( | const double & | theta | ) | [inline] |
Definition at line 205 of file RobotTypes.H.
Referenced by StereoDataCollector::fileWriterThread(), main(), moveRelative(), rotateAbsolute(), rotateRelative(), translate(), and updateWaypoint().
| const double x | ( | ) | const [inline] |
Definition at line 207 of file RobotTypes.H.
| const double y | ( | ) | const [inline] |
Definition at line 208 of file RobotTypes.H.
| const double theta | ( | ) | const [inline] |
Definition at line 209 of file RobotTypes.H.
 1.5.1
1.5.1